|
I am a software engineer at Google in Seattle where I work on Project Starline. My background is in computer vision. Before joining Google, I worked at Microsoft on HoloLens and Azure Spatial Anchors. I did my Phd in electrical engineering with Joseph Mundy at Brown University. After Phd, I did a post-doc at the Max-Planck Institute for Intelligent Systems in Tubingen where I was advised by Michael J Black and Andreas Geiger. Email / Google Scholar / LinkedIn / CV |

|
|
My research interests span computer vision, graphics and machine learning. I'm particulary interested in inferring 3D structure and motion from images. Representative papers are highlighted below. |

|
Despoina Paschalidou, Ali Osman Ulusoy, Andreas Geiger CVPR, 2019 video / code / blog post Neural networks can learn to parse a 3D model into a small set of Superquadrics. |
|
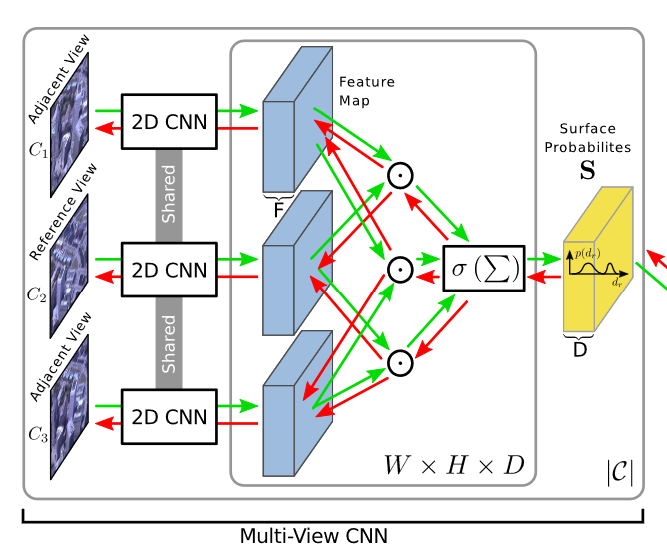
Despoina Paschalidou, Ali Osman Ulusoy, Carolin Schmitt, Andreas Geiger CVPR, 2018 (Spotlight Presentation) video / code / project page RayNet is a neural network for 3D reconstruction from images. We integrate unrolled belief propagation within the network, so that it doesn't have to learn about geometry of perspective projection and occlusion, but rather focus on learning view-invariant features. |

|
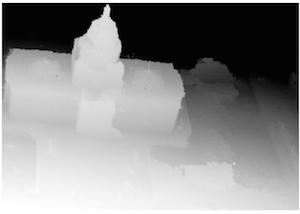
Gernot Riegler, Ali Osman Ulusoy, Horst Bischof, Andreas Geiger 3DV, 2017 (Oral Presentation) video / code Learning depth-fusion can be much more accurate than traditional TSDF fusion and TV-L1 fusion. |
|
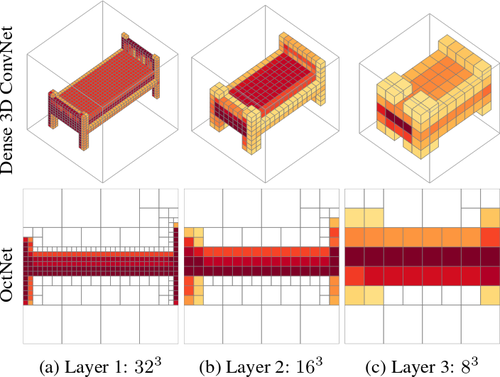
Gernot Riegler, Ali Osman Ulusoy, Andreas Geiger CVPR, 2017 (Oral Presentation) video / code We accelerate 3D convolutional neural networks using octrees. |
|
Ali Osman Ulusoy, Michael J Black, Andreas Geiger CVPR, 2017 video We extend our 3DV 2015 paper with object-level 3D shape priors. Inference in this factor graph yields dense 3D geometry in addition to the 6DOF pose of objects in it. |

|
Octavian Biris, Ali Osman Ulusoy, Joseph L. Mundy Image and Vision Computing, 2017 We extend Horn and Schunck's optical flow formulation to 3D volumetric models and use it for compression. |
|
Ali Osman Ulusoy, Michael J Black, Andreas Geiger CVPR, 2016 video / code We extend our 3DV 2015 paper with non-local planarity surface priors. Much of the paper is about efficient inference in the factor graph. |

|
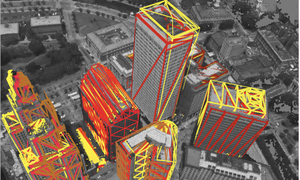
Ali Osman Ulusoy, Andreas Geiger, Michael J Black 3DV, 2015 (Best Paper Award) video / code We formulate multi-view stereo as inference in a factor graph. This allows exposing the inherent ambiguities in surface reconstruction from images, and incorporating surface priors. |
|
Ali Osman Ulusoy, Joseph L. Mundy ECCV, 2014 video We use a stream of images captured over time to continuously update a 3D model with changes in the environment. |
|
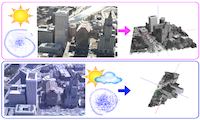
Maria Restrepo, Ali Osman Ulusoy, Joseph L. Mundy ISPRS Journal of Photogrammetry and Remote Sensing, 2014 We study the problem of registering volumetric 3D models, by evaluating sensitivity to discretization, camera registration errors, and changes in illumination. |
|
Ali Osman Ulusoy, Octavian Biris, Joseph L. Mundy ICCV, 2013 video We reconstruct arbitrary dynamic 3D scenes accurately using a view-dependent volumetric modeling, and efficiently by exploiting redundancies in space and time. |
|
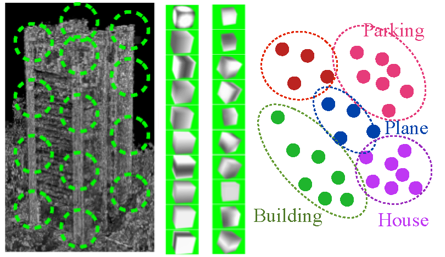
Maria Restrepo, Brandon Mayer, Ali Osman Ulusoy, Joseph L. Mundy IEEE Journal of selected topics in Signal Processing, 2012 We solve 3D object recognition in the context of volumetric 3D models. |
|
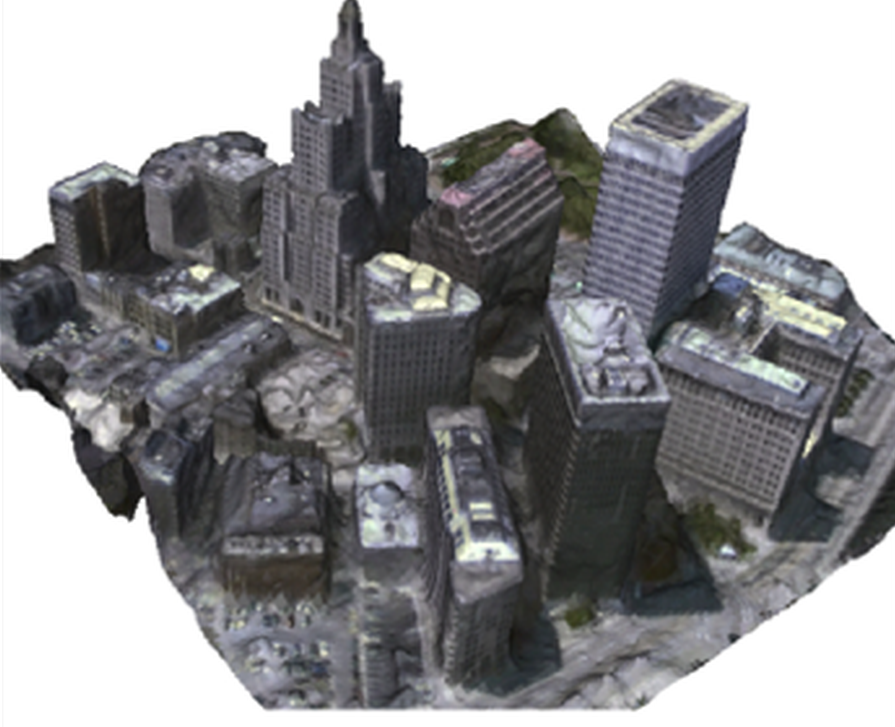
Fatih Calakli, Ali Osman Ulusoy, Maria Restrepo, Gabriel Taubin, Joseph L. Mundy 3D Imaging Modeling Processing Visualization Transmission (3DIMPVT), 2012 (Oral Presentation) video We fuse images from different viewpoints into a volumetric probabilistic model and extract a textured mesh from it. |
|
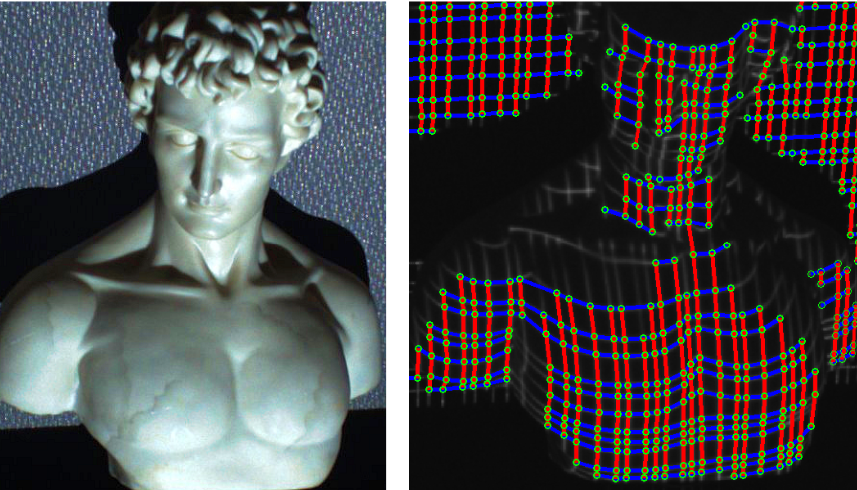
Ali Osman Ulusoy, Fatih Calakli, Gabriel Taubin CVPR workshop, 2010 We use factors graphs and belief propagation to solve 3D scanning using structured light. |
|
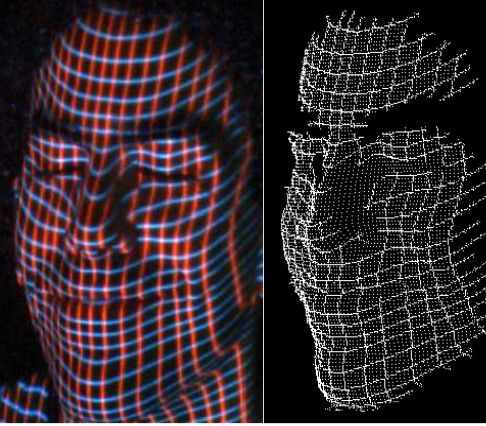
Ali Osman Ulusoy, Fatih Calakli, Gabriel Taubin 3DIM workshop at ICCV, 2009 We project a grid pattern with unique spacings onto an object to reconstruct its 3D structure. |